Yökerhon strobo-ohjaus prototyyppi joystickillä
Projektin tarkoituksena oli toteuttaa Arduinosta ja kahdesta muusta komponentista jokin toimiva asia.
Kyseessä on Tero Karvisen Prototyypin rakentaminen kurssi.
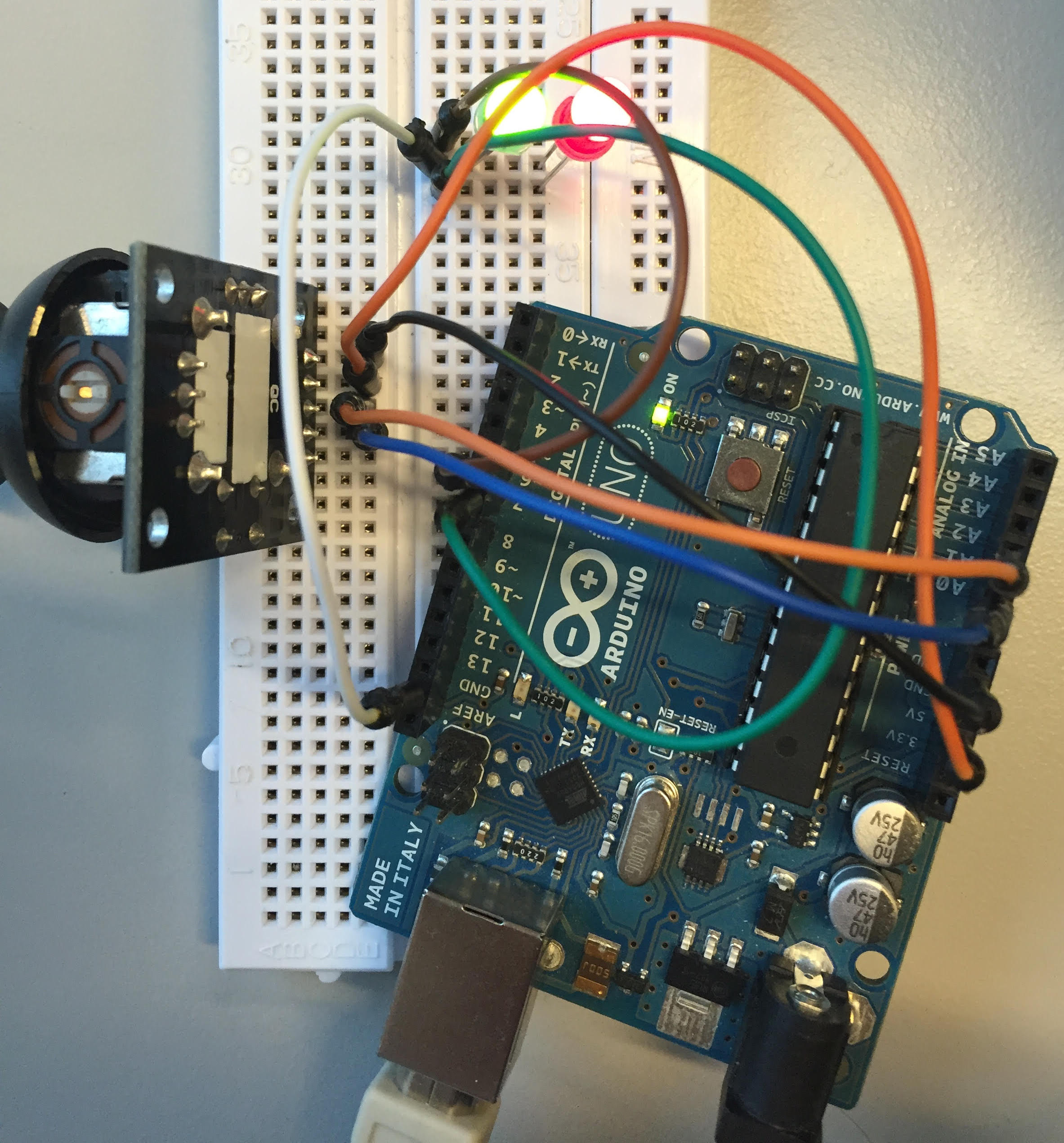
Saimme komponenteiksi Keyes_Sjoys ilotikun (joystick) sekä muutaman ledin.
Päädyimme tekemään simuloidun yökerhon valonohjauslaitteen jolla ohjataan strobo-ledejä.
Joystickin Y-akselilla kytketään led 1 ja/tai led 2 päälle ja pois.
X-akselilla säädetään valojen vilkkumisnopeutta.
Koodin voi myös lukea Bitbucketista
int led1 = 7;
int led2 = 6;
int joyPin1 = 0;
int joyPin2 = 1;
int x = 0;
int y = 0;
bool led1Status = 0; // Onko kytketty vai ei
bool led2Status = 0;
int blinkTimer = 500; // Miten nopeasti vilkutetaan
void setup() {
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
Serial.begin(9600);
}
void loop() {
// Luetaan joystickin asento (0-1024)
x = analogRead(joyPin1);
delay(10);
y = analogRead(joyPin2);
// Sytytetään/sammutetaan ledejä mikäli joystick ylhäällä tai alhaalla
if(y>700){
led1Status = switchStatus(led1, led1Status);
}
if(y < 300){
led2Status = switchStatus(led2, led2Status);
}
// Listätään/vähennetään vilkkumisnopeutta mikäli joystick sivuilla
if(x>700){
decreaseSpeed();
}
if(x < 300){
increaseSpeed();
}
// Vilkutetaan ledejä aiemmilla parametreilla
if(led1Status){
digitalWrite(led1, HIGH);
}
if(led2Status){
digitalWrite(led2, HIGH);
}
delay(blinkTimer);
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
delay(blinkTimer);
}
void decreaseSpeed(){
blinkTimer = blinkTimer + 50;
Serial.print("Less speed: ");
Serial.println(blinkTimer);
}
void increaseSpeed(){
blinkTimer = blinkTimer - 50;
if(blinkTimer < 51){
blinkTimer = 50;
}
Serial.print("More speed: ");
Serial.println(blinkTimer);
}
bool switchStatus(int led, bool ledStatus){
if(ledStatus){
digitalWrite(led, LOW);
Serial.print("Led ");
Serial.print(led);
Serial.println(": off");
return 0;
}else{
digitalWrite(led, HIGH);
Serial.print("Led ");
Serial.print(led);
Serial.println(": on");
return 1;
}
}
Kim Salmi & Antti Stenman
tunn.us